
本文提出了一种基于旋转矩阵的无表征模型预测控制方法 (RF-MPC),避免了欧拉角奇异性和四元数冗余问题。利用变分线性化推导旋转矩阵的线性动力学,结合二次规划实时求解,实现了四足机器人在复杂动态任务中的高效稳定控制。实验表明,该方法在多样化运动中具备优越的稳定性和计算性能。
作者信息
编号:MAP-20
大小:355K
环境:Matlab R2020b、R2024b
作者:张家梁(自研改进)
引言
四足机器人因其出色的机动性和环境适应性,在灾害救援、探测和物流等应用中具有广阔前景。为了在复杂环境下实现动态运动控制,模型预测控制 (MPC) 已成为一种有力工具。然而,传统MPC通常依赖于欧拉角或四元数来描述姿态,前者存在奇异性问题,后者存在约束冗余与数值不稳定性,这些问题限制了MPC在动态四足运动中的应用。为此,我们提出了一种 无表征的MPC框架,其核心在于直接采用旋转矩阵来表征姿态。通过变分线性化方法,我们能够在旋转矩阵空间内推导出一致的线性动力学,从而保证控制器在数值上的稳定性与鲁棒性。
系统架构
1.系统概述
随着四足机器人在灾害救援、探测与复杂地形任务中的广泛应用,其动态运动控制的实时性与稳定性成为研究重点。传统的模型预测控制 (MPC) 方法在姿态表示上通常依赖欧拉角或四元数:前者存在奇异性问题,后者则引入约束冗余与数值不稳定性,限制了在高动态任务中的应用。
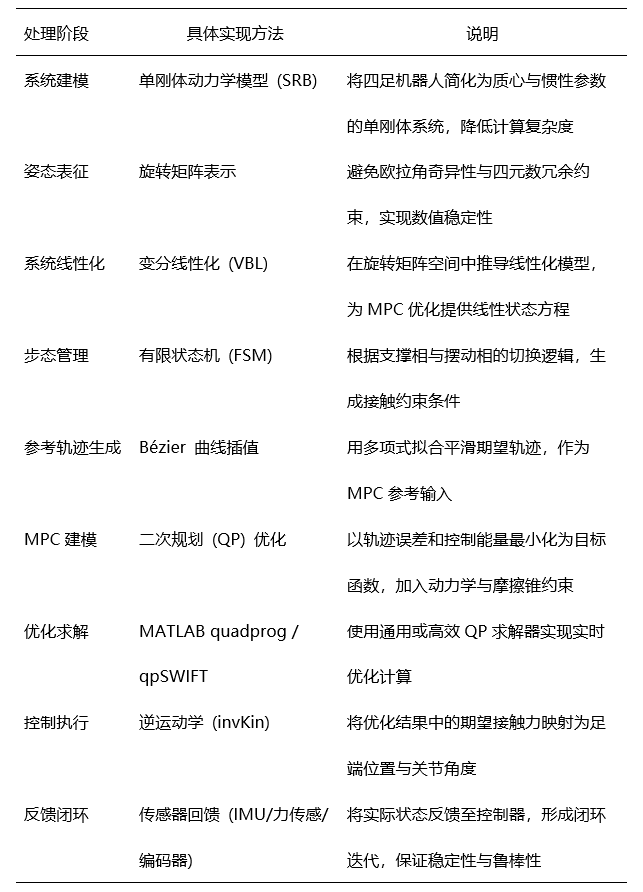
为了解决这一问题,本文采用 无表征模型预测控制 (Representation-Free MPC, RF-MPC) 框架。该系统的核心思想是:
(1)使用 旋转矩阵 直接表征机器人姿态,避免奇异性与冗余问题;
(2)基于 单刚体动力学模型 (Single Rigid Body, SRB) 描述四足机器人质心和整体姿态的动力学特性;
(3)通过 变分线性化 (Variation-Based Linearization, VBL) 方法推导旋转矩阵上的线性化动力学,使得系统能够嵌入到 MPC 优化框架中;
(4)将优化问题构建为 二次规划 (Quadratic Programming, QP),并采用 quadprog 或高效的 qpSWIFT 求解器实现实时控制;
(5)结合 有限状态机 (FSM) 管理步态切换,确保机器人在支撑相与摆动相之间平滑过渡;
(6)通过 逆运动学模块 将最优接触力分布转换为关节角度命令,实现机器人执行。
该系统架构在保证实时性的同时,提高了对复杂动态任务(如小跑、奔跑、快速转向和跳跃)的适应性与鲁棒性,实验结果表明其在轨迹跟踪精度和计算效率方面均优于传统 MPC 方法。
2.系统流程图

研究方法
文采用基于旋转矩阵姿态表征与变分线性化的无表征模型预测控制方法,通过单刚体动力学建模、二次规划优化与逆运动学求解,实现四足机器人在多样化动态运动中的实时稳定控制。
实验结果
实验结果表明: 所提出的 RF-MPC 控制方法能够有效提升四足机器人在动态运动中的轨迹跟踪精度与姿态稳定性。
运行main.m
图1:四足机器人 RF-MPC 仿真结果:位置、速度、角速度与地面反作用力
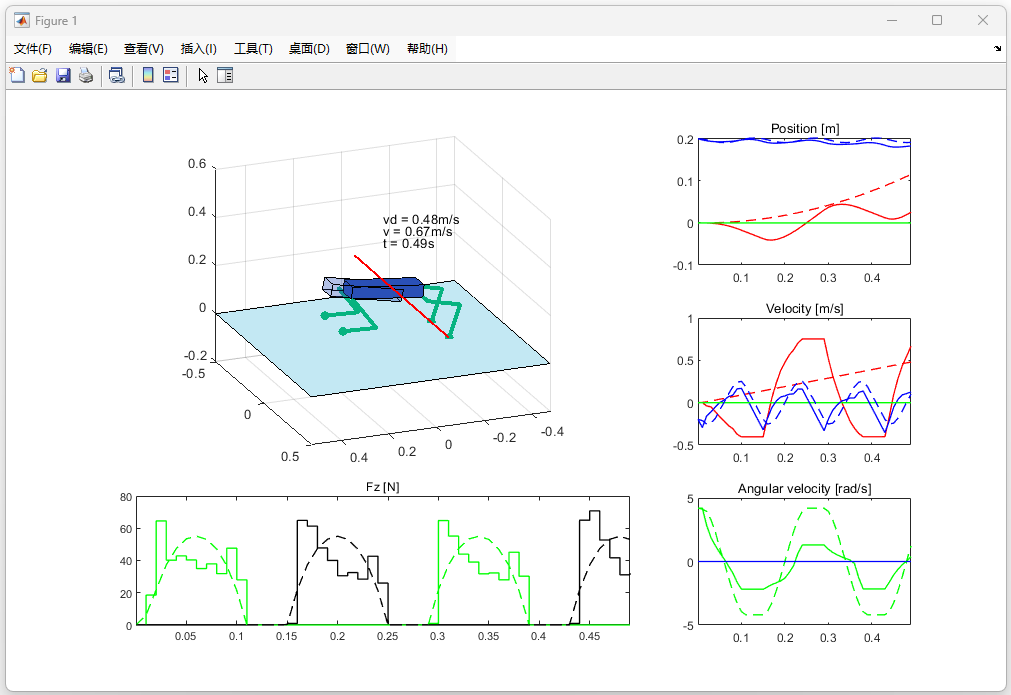
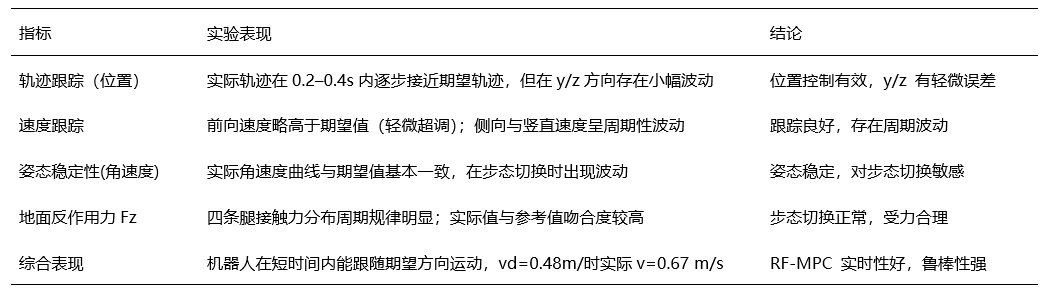
表1:仿真结果各子图的功能与分析
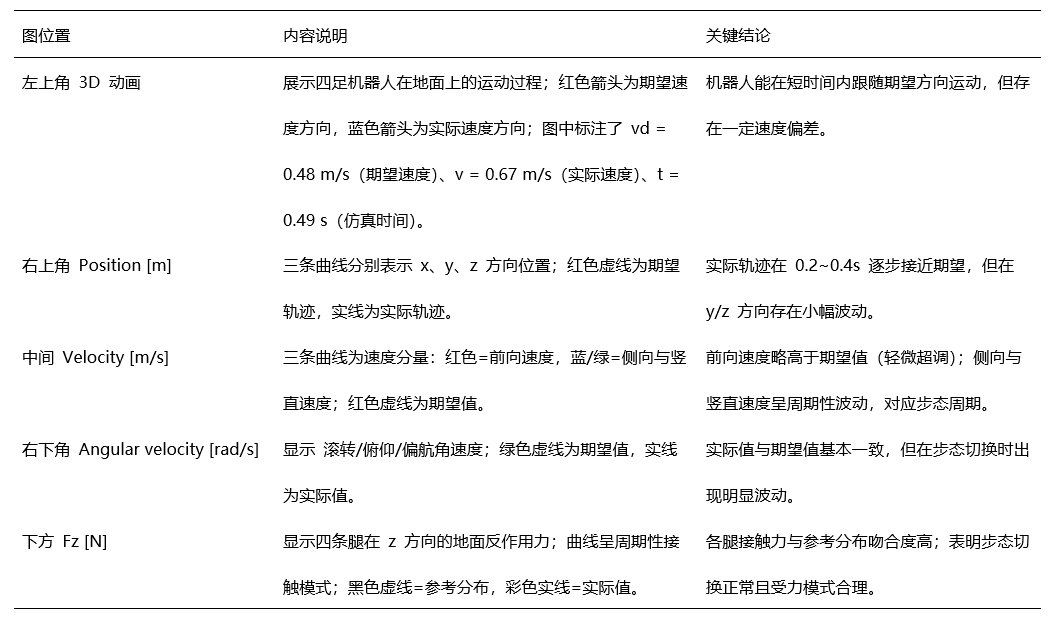
该图全面展示了 RF-MPC 控制器 在四足机器人运动过程中的性能:
(1)轨迹跟踪:位置与速度能较好地跟随期望轨迹,但存在轻微超调和横向波动。
(2)步态稳定性:地面反作用力周期性变化清晰,表明步态切换正常。
(3)姿态控制:角速度基本符合期望,步态切换处略有抖动。
整体结果验证了 RF-MPC 在 动态运动跟踪 与 稳定步态生成 方面的有效性。
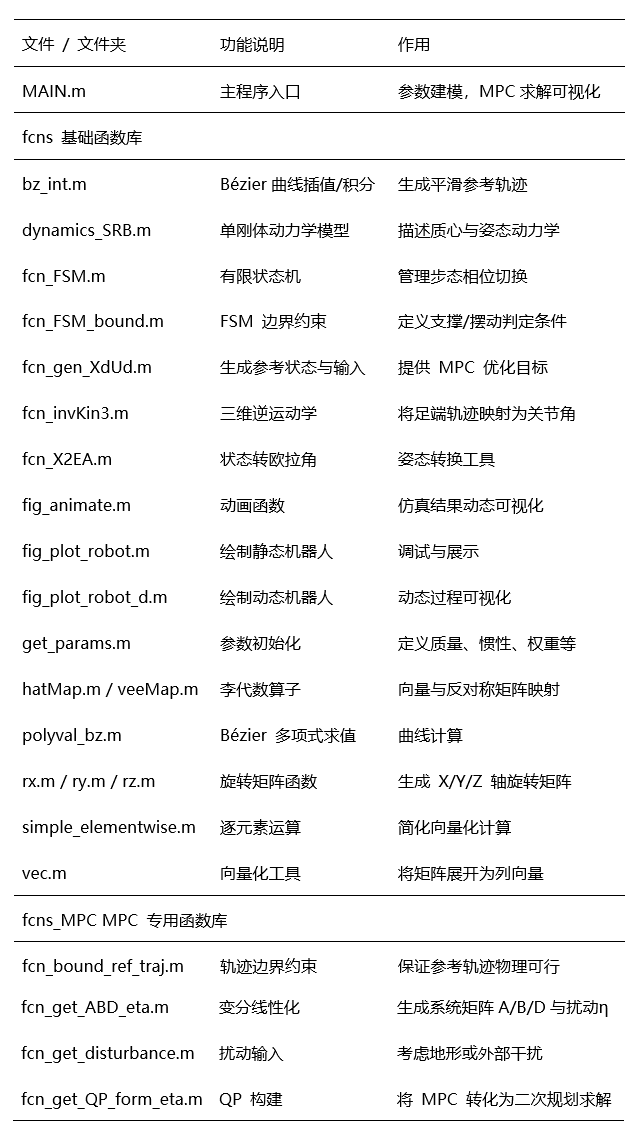
系统实现
本系统完全基于MATLAB平台开发,主要集成以下脚本与模块:
研究结论
实验结果表明,所提出的 RF-MPC 控制框架能够在动态步态下实现较为有效的位置与速度控制,机器人在短时间内即可跟随期望方向运动,位置跟踪总体稳定,仅在侧向与竖直方向存在轻微误差;速度控制性能良好,但受到步态周期影响仍存在一定波动;姿态角速度控制基本稳定,仅在步态转换时对扰动较为敏感;地面反作用力分布规律清晰,支撑与摆动相切换正常,受力模式合理,验证了优化约束的正确性。综合来看,RF-MPC 在动态运动中展现出良好的实时性与鲁棒性,为四足机器人在复杂环境下的稳定控制提供了有效方法。
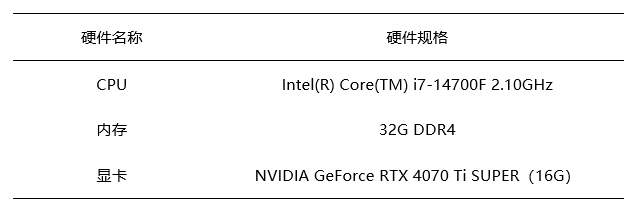
实验环境
硬件配置如表:实验所用硬件平台为惠普(HP)暗影精灵10台式机整机,运行 Windows 11 64 位操作系统,作为模型训练与测试的主要计算平台,能够良好支持Matlab的开发需求。
官方声明
实验环境真实性与合规性声明:
本研究所使用的硬件与软件环境均为真实可复现的配置,未采用虚构实验平台或虚拟模拟环境。实验平台为作者自主购买的惠普(HP)暗影精灵 10 台式整机,具体硬件参数详见表。软件环境涵盖操作系统、开发工具、深度学习框架、MATLAB工具等,具体配置详见表,所有软件组件均来源于官方渠道或开源社区,并按照其许可协议合法安装与使用。
研究过程中严格遵循学术诚信和实验可复现性要求,确保所有实验数据、训练过程与结果均可在相同环境下被重复验证,符合科研规范与工程实践标准。
版权声明:
本算法改进中涉及的文字、图片、表格、程序代码及实验数据,除特别注明外,均由7zcode.张家梁独立完成。未经7zcode官方书面许可,任何单位或个人不得擅自复制、传播、修改、转发或用于商业用途。如需引用本研究内容,请遵循学术规范,注明出处,并不得歪曲或误用相关结论。
本研究所使用的第三方开源工具、框架及数据资源均已在文中明确标注,并严格遵守其相应的开源许可协议。使用过程中无违反知识产权相关法规,且全部用于非商业性学术研究用途。
评论(0)