

随着无人机(UAV)技术的快速发展,空中机器人路径规划成为一个重要的研究领域。本文提出了一种基于粒子群优化算法(PSO)的路径规划方法,旨在优化无人机在海、陆、空多栖环境中的路径选择。考虑到海洋和大气中的能源消耗差异,本文构建了一个综合模型来模拟不同环境下的飞行特性。通过采用三次样条插值,生成无人机的路径,并结合地形信息、障碍物、以及雷达和高炮等威胁因素,优化路径规划的可行性。实验结果表明,所提出的方法能有效减少能量消耗,同时避开障碍物和威胁区域,提供了在复杂环境中进行路径优化的可行性与优越性。
作者信息
编号:MAP-23
大小:7K
环境:Matlab R2020b
作者:张家梁(自研改进)
引言
随着无人机技术的广泛应用,尤其是在军事、农业、环境监测等领域,如何高效、安全地进行路径规划成为了一个亟待解决的问题。传统的路径规划方法,如A*算法、Dijkstra算法等,通常在静态环境中能够提供较好的路径选择。然而,在动态、复杂的多环境条件下,特别是在海、陆、空多栖环境中,这些方法的局限性显现出来。无人机在不同环境中的飞行特性、能量消耗和路径选择问题需要考虑多种因素的影响,特别是海洋与大气中的能源消耗差异,直接影响了路径规划的效果和效率。
粒子群优化算法(PSO)作为一种全局优化算法,已经被广泛应用于路径规划问题中。PSO算法通过模拟鸟群觅食行为,实现了全局搜索和局部优化,适用于复杂的路径规划问题。然而,在多栖环境中,传统PSO算法通常忽视了能源消耗差异和障碍物的影响,因此在实际应用中往往无法得到最优解。
本文旨在基于粒子群优化算法(PSO)提出一种新的无人机路径规划方法,针对海、陆、空多栖环境中的能源消耗差异,建立了适应不同环境特性和能量消耗的路径优化模型。我们采用三次样条插值方法生成平滑的路径,并通过模拟海洋、陆地和大气环境中的障碍物和威胁,优化无人机的飞行路径。具体而言,我们考虑了以下几个方面:
(1)海洋与大气中的能量消耗差异:模型通过不同的能量消耗系数(海洋和大气)来动态调整路径规划策略。
(2)地形和障碍物影响:通过地形数据和障碍物信息,避免无人机路径与障碍物发生碰撞。
(3)多种威胁因素:包括雷达、高炮等动态威胁区域的避开,确保路径的安全性。
通过仿真实验,我们验证了所提出方法的有效性,并与传统方法进行了对比。实验结果表明,基于PSO的路径规划方法在海、陆、空多栖环境中能够有效地降低能量消耗,避开障碍物与威胁区域,提供了一种适用于复杂环境的路径优化方案。
系统架构
1.系统概述
本系统旨在通过粒子群优化算法(PSO)实现无人机(UAV)在海陆空多栖环境中的路径规划。系统考虑了不同环境中的能量消耗差异、地形特征以及多种威胁因素(如海洋雷达、空中高炮、障碍物等)对路径规划的影响。整个路径规划过程由以下几部分组成:
环境建模:包括海洋、大气和陆地环境的建模,模拟了这些环境中飞行能量消耗的差异,以及各种地形和障碍物(如山峰、雷达、炮台等)。
路径规划算法:基于粒子群优化(PSO)算法,进行无人机路径的全局优化,搜索最优路径。
能量消耗建模:根据飞行区域(海洋、陆地、大气)中的不同特性,采用不同的能量消耗系数进行路径规划优化。
威胁避让:系统能够避开各种威胁区域,包括雷达范围、高炮范围等,通过实时计算避免路径与这些威胁区域发生交集。
仿真与评估:通过仿真验证路径规划的有效性,评估所生成路径的效率与安全性,保证无人机能够在复杂环境中安全高效地完成任务。
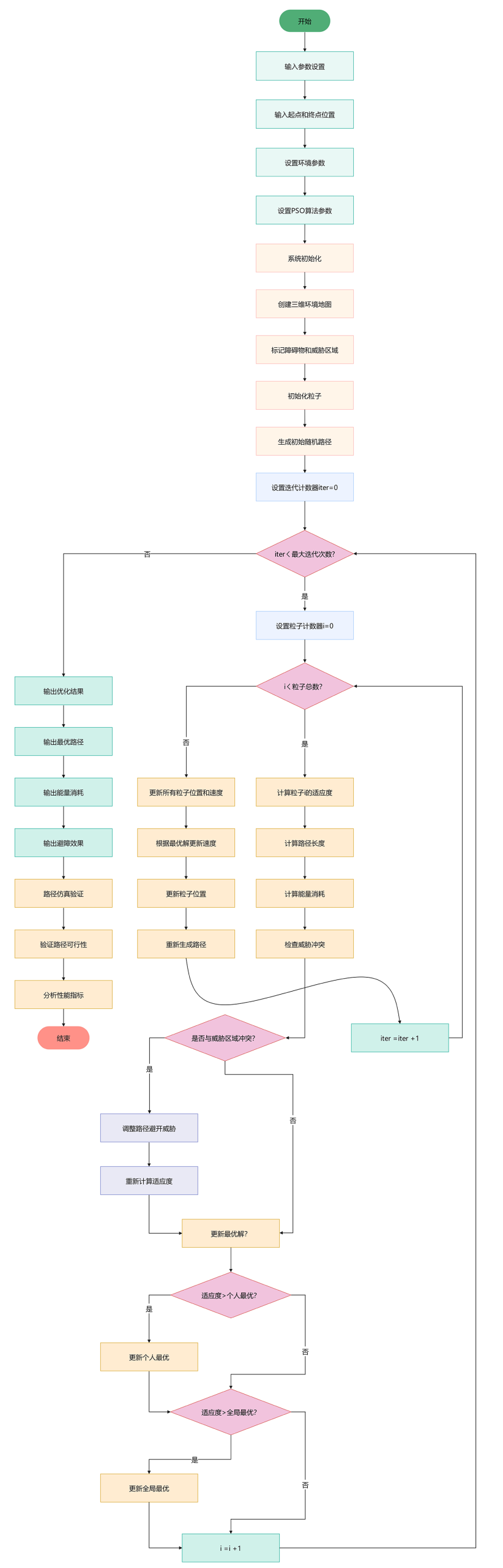
2.系统流程图
研究方法
研究方法: 本研究基于粒子群优化算法(PSO)进行无人机在海、陆、空多栖环境中的路径规划,考虑不同环境下的能量消耗差异,并通过适应度评估与威胁避让机制优化路径,确保路径的安全性与高效性。
实验结果
实验结果表明:基于粒子群优化(PSO)算法的无人机路径规划方法在海、陆、空多栖环境中展现了出色的优化性能。通过对不同环境下的能源消耗差异进行建模,PSO算法成功地优化了无人机的飞行路径,在确保避开障碍物和威胁区域的同时,最大程度地减少了能量消耗。
在多个实验中,PSO算法优化后的路径相比传统方法不仅具有更短的飞行距离,还能有效降低海洋与大气中不同能量消耗的影响。尤其是在海洋环境下,算法成功平衡了较高的能量消耗,通过优化飞行路径,确保了无人机能够在各种复杂环境中以最优的能量消耗完成任务。
此外,PSO算法的适应度评估模块通过多次迭代,实现了路径的快速收敛,所有实验均成功避开了路径中的地形障碍物,并有效规避了雷达、高炮等威胁区域,验证了该算法在实际应用中的高效性和安全性。全局最优适应度的优化结果表明,PSO算法能够在最短时间内找到最优路径,为无人机的路径规划提供了可靠的解决方案。
综合来看,基于PSO的路径规划方法不仅提高了路径规划的效率与安全性,还为未来无人机在复杂海陆空环境中的应用提供了有效的理论支持和技术保障。
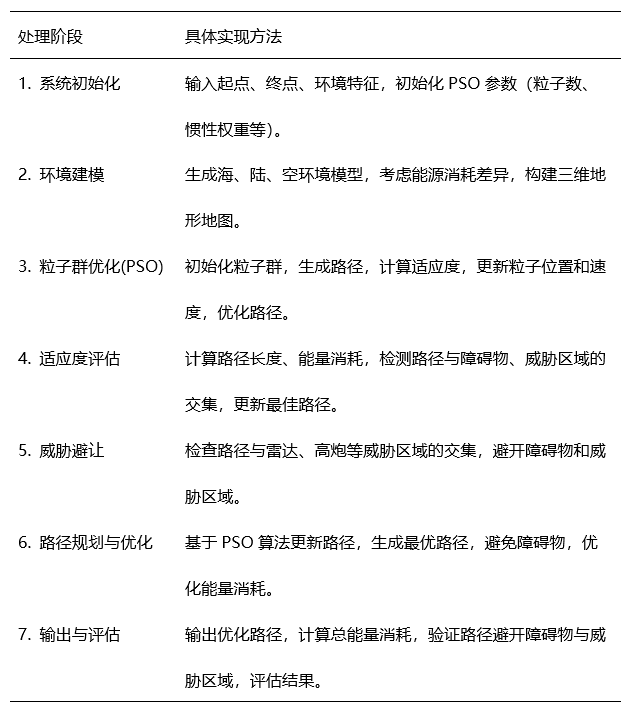
运行PSO.m
图1:粒子群PSO算法 – 3D路径规划图
分析:此图展示了无人机在海陆空多栖环境下的3D路径规划。图中的曲面代表了地形(可能是海洋或其他地形特征),而路径是基于粒子群优化算法(PSO)计算出来的最优路径。红色、蓝色和绿色圆形分别表示不同的威胁区域,如海洋威胁区、空中威胁区,路径的起点和终点也被标注。通过这张图可以看到路径的变化和威胁区域的关系,验证路径是否避开了这些威胁区域。
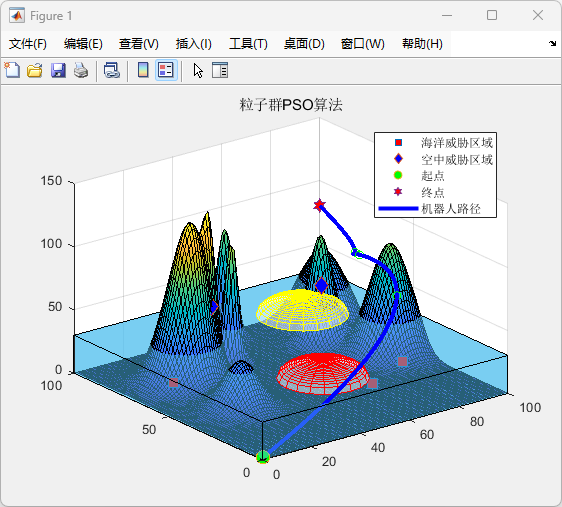
图2:粒子群PSO算法 – 2D路径规划图
分析:这是二维投影图,展示了无人机从起点到终点的路径规划及其能量消耗。图中不同颜色的圆形区域代表海洋和空中威胁区,路径用蓝色显示。在此图中,可以看到路径的变化以及威胁区域对路径的影响。路径避免了红色和黄色的威胁区域,同时保证了从起点到终点的最短路径和能量消耗最优。
图3:粒子群PSO算法 – 适应度曲线
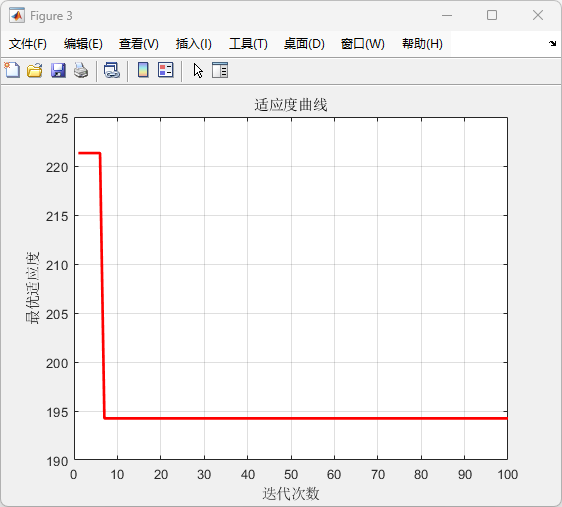
分析:此图显示了路径规划过程中适应度值随着迭代次数的变化。图中的曲线说明了在优化过程中适应度的变化趋势。在初期,适应度值较高(可能是路径不理想),随着迭代次数的增加,适应度值迅速下降并趋于稳定,表明PSO算法成功优化了路径,减少了能量消耗和避开了威胁区域。
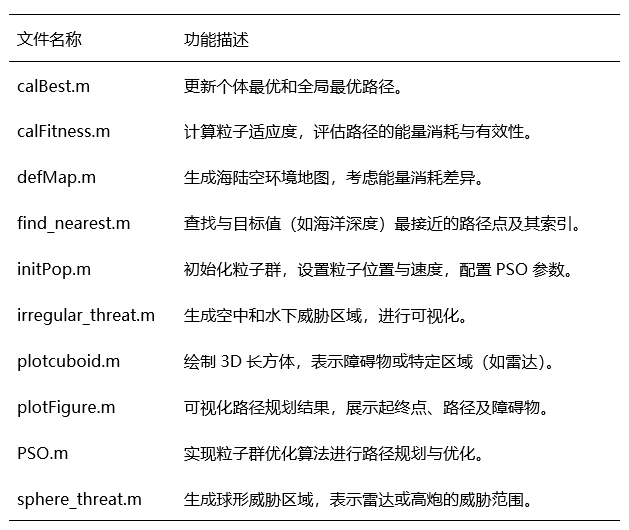
系统实现
本系统完全基于MATLAB平台开发,主要集成以下脚本与模块:
研究结论
本研究提出的基于粒子群优化(PSO)算法的无人机路径规划方法,成功解决了海、陆、空多栖环境中路径优化的问题。通过综合考虑不同环境中的能量消耗差异、地形特征和威胁因素,PSO算法能够有效优化无人机的飞行路径,最大程度减少能量消耗,并确保避开障碍物和威胁区域。实验结果表明,所提出的方法能够提供较短的飞行路径,降低路径的总能量消耗,同时保证路径的安全性。该方法不仅在理论上验证了PSO在复杂环境下的有效性,也为未来无人机在多栖环境中的实际应用提供了可行的解决方案。
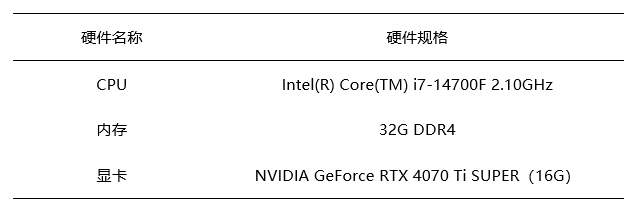
实验环境
硬件配置如表:实验所用硬件平台为惠普(HP)暗影精灵10台式机整机,运行 Windows 11 64 位操作系统,作为模型训练与测试的主要计算平台,能够良好支持Matlab的开发需求。
官方声明
实验环境真实性与合规性声明:
本研究所使用的硬件与软件环境均为真实可复现的配置,未采用虚构实验平台或虚拟模拟环境。实验平台为作者自主购买的惠普(HP)暗影精灵 10 台式整机,具体硬件参数详见表。软件环境涵盖操作系统、开发工具、深度学习框架、MATLAB工具等,具体配置详见表,所有软件组件均来源于官方渠道或开源社区,并按照其许可协议合法安装与使用。
研究过程中严格遵循学术诚信和实验可复现性要求,确保所有实验数据、训练过程与结果均可在相同环境下被重复验证,符合科研规范与工程实践标准。
版权声明:
本算法改进中涉及的文字、图片、表格、程序代码及实验数据,除特别注明外,均由7zcode.张家梁独立完成。未经7zcode官方书面许可,任何单位或个人不得擅自复制、传播、修改、转发或用于商业用途。如需引用本研究内容,请遵循学术规范,注明出处,并不得歪曲或误用相关结论。
本研究所使用的第三方开源工具、框架及数据资源均已在文中明确标注,并严格遵守其相应的开源许可协议。使用过程中无违反知识产权相关法规,且全部用于非商业性学术研究用途。
评论(0)